さてさて、だいぶ時間が空いてしまいましたが前回はついに人物モデリングに挑戦したという所までお話しましたね。
この人物モデリング。まだ完成には至っておらず本当すさまじい工数がかかっています。人物モデリングって本当大変なんだなぁ・・・おごご・・・。
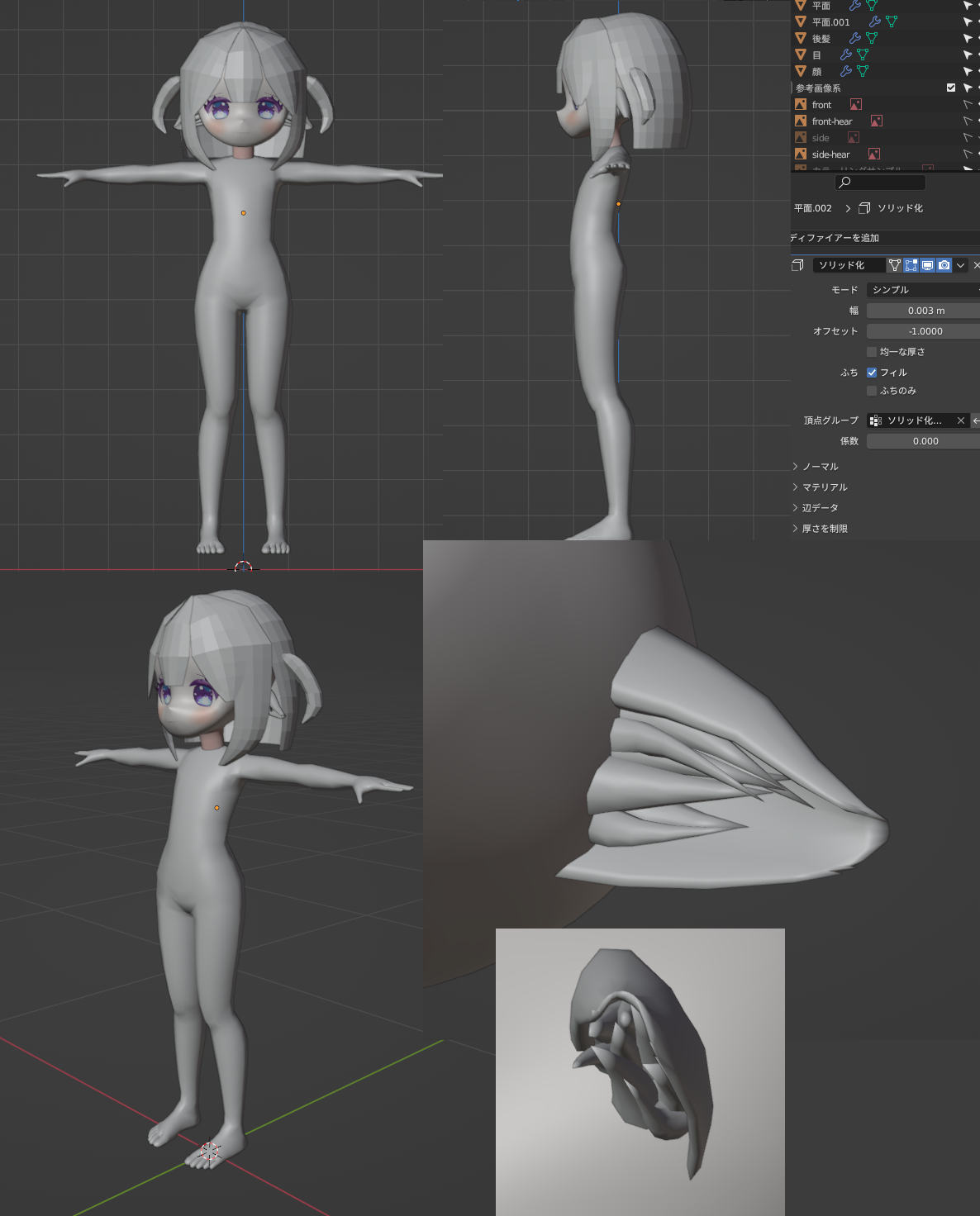
さて、素体の簡単なモデリングを済ませた後は手のモデリングを開始しました。
先に出来上がった物から。

ちょっとなんかずれてたり変な所あるかもしれないけど初回の割には悪くない気はする。
実は手を作る事自体はそんなに難しくなくて本当に難しいのは手を上手に曲げる事が出来るかという所。
ここで初めてこのモデルへの初ウェイト設定を行う事となったのですが指の関節を動かすとき、曲げるときに外側は伸びていくのに対し内側は縮んでいく形になるのでこれをウェイト一つだけで表現するのはかなり難しくトポロジの作り方、面の割りを意識する必要があるとのことです。
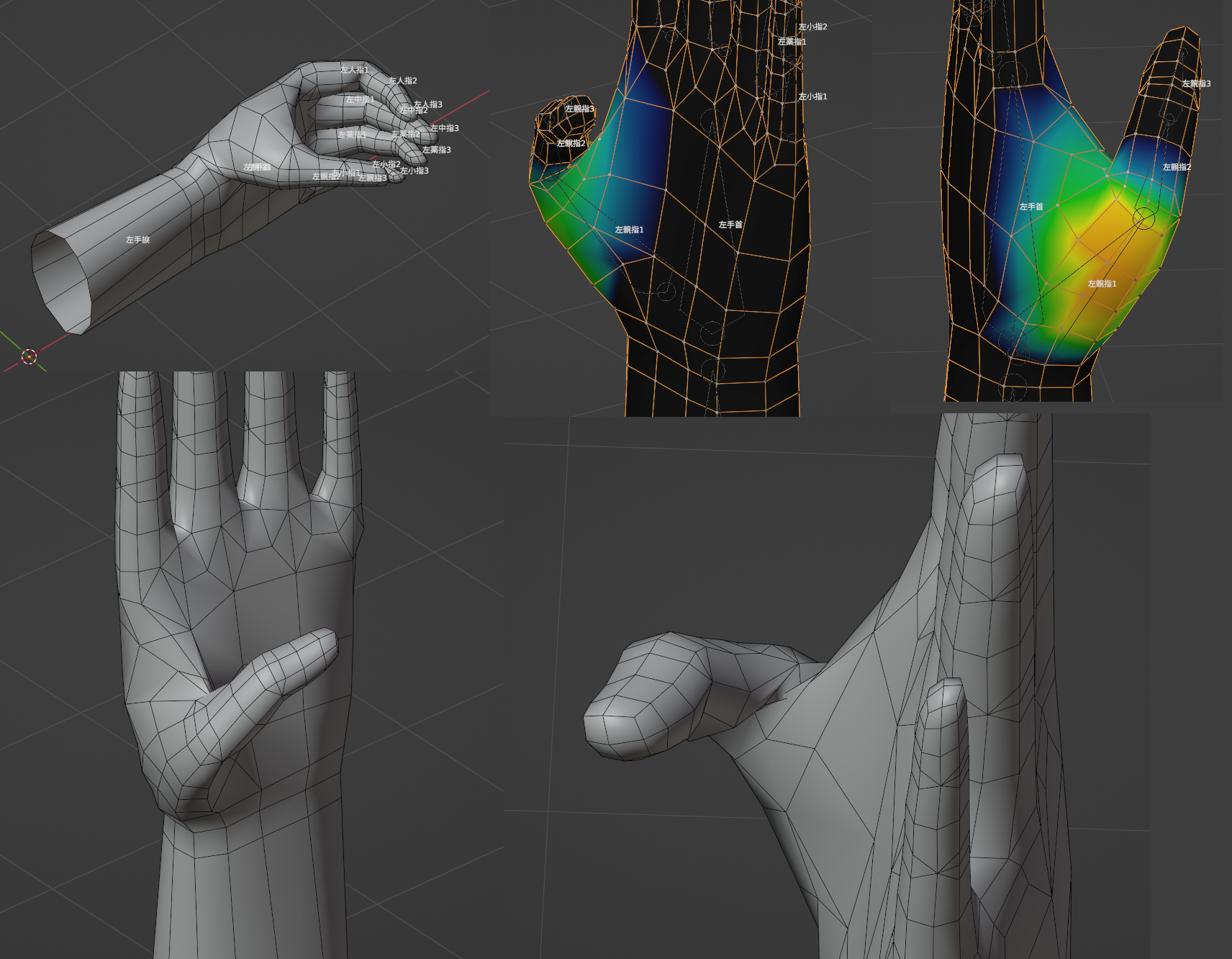
よくみると指の関節部分の内側の所は面がちょっと少なくて外側の所は割りが増えている事が分かるはず。
これが一般的な可動部分の推奨される作り方っぽい。
指みたいに曲がる所が限られてる箇所はまだいいんだけど親指の付け根の部分は可動範囲が非常に広くちょっと動かしただけで凄いねじれるような形になってしまった。
ここのウェイト設定はマジで難しいし頂点の位置もちょっとあんまりよろしくなかったせいで痩せるわ捻じれるわ滅茶苦茶沼りました・・・。
本当モデリングするときは後に動かすことを意識しながら頂点置いていかないと苦労しまくる事になりますね。

そして足。
足はまぁ正直足フェチでもなければがっつりアップで映る事は少ないと思うのでそこまで気にしなくてもいいのかも?
足は親指の付け根みたいに可動範囲が広い所は少ないのでこっちはまだ簡単にモデリング出来ましたね。
例によって指の大きさとか微妙に変に思える箇所はあるけどまぁここは妥協の精神。